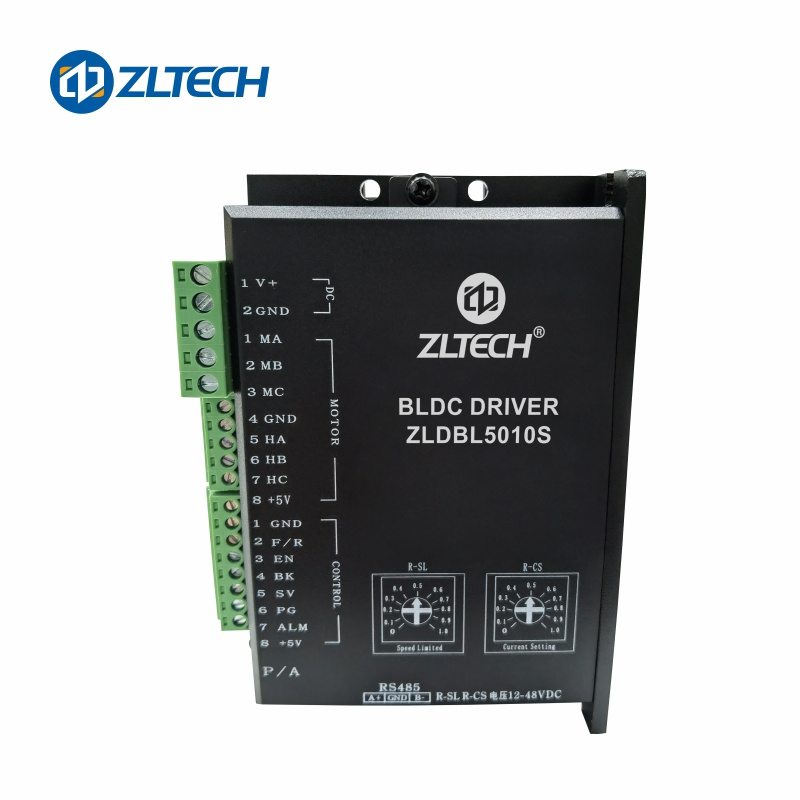
کنترلر موتور بدون جاروبک ZLTECH Modbus RS485 24V-48VDC برای بازوی ربات



ویژگی های
1. سرعت PID، تنظیم کننده دو حلقه فعلی
2. سازگار با سالن و بدون سالن، تنظیم پارامتر، حالت غیر القایی فقط برای موارد خاص مناسب است (شروع بار ملایم است)
3. عملکرد بالا و قیمت پایین
4. فرکانس چاپر 20 کیلوهرتز
5. عملکرد ترمز الکتریکی، به طوری که پاسخ موتور به سرعت
6. اضافه بار چندگانه بیشتر از 2 است، گشتاور همیشه می تواند در سرعت کم به حداکثر برسد
7. با ولتاژ بیش از حد، زیر ولتاژ، بیش از جریان، بیش از دما، سیگنال سالن عملکرد زنگ خطا غیرقانونی
نشانگرهای الکتریکی
ولتاژ ورودی استاندارد توصیه شده: 24VDC تا 48VDC، نقطه حفاظت در برابر ولتاژ 9VDC، نقطه حفاظت از اضافه ولتاژ 60VDC.
حداکثر جریان حفاظت اضافه بار ورودی پیوسته: 15A.مقدار پیش فرض کارخانه 10A است.
ثابت زمان شتاب مقدار کارخانه: 1 ثانیه دیگر قابل تنظیم.
ملاحضات امنیتی
این محصول یک تجهیزات الکتریکی حرفه ای است که باید توسط پرسنل حرفه ای و فنی نصب، عیب یابی، بهره برداری و نگهداری انجام شود.استفاده نادرست منجر به برق گرفتگی، آتش سوزی، انفجار و سایر خطرات می شود.
این محصول از منبع تغذیه DC تغذیه می کند.لطفاً قبل از روشن کردن برق از درست بودن پایانه های مثبت و منفی منبع تغذیه مطمئن شوید
هنگامی که کابل ها روشن هستند، آنها را وصل یا جدا نکنید.کابل ها را در حین روشن شدن کوتاه نکنید.در غیر این صورت ممکن است محصول آسیب ببیند
اگر موتور در حین کار نیاز به تغییر جهت داشته باشد، باید سرعت آن را کاهش داد تا موتور قبل از معکوس کردن متوقف شود
راننده پلمپ نیست.اجسام خارجی الکتریکی یا قابل احتراق مانند پیچ و تراشه های فلزی را با درایور مخلوط نکنید.هنگام نگهداری و استفاده از درایور به رطوبت و گرد و غبار توجه کنید
درایور یک دستگاه قدرت است.سعی کنید اتلاف گرما و تهویه را در محیط کار حفظ کنید
مولفه های
| راننده | ZLDBL5010S |
| ولتاژ ورودی (V) | 24V-48V DC |
| جریان خروجی (A) | 10 |
| روش کنترل | مدباس RS485 |
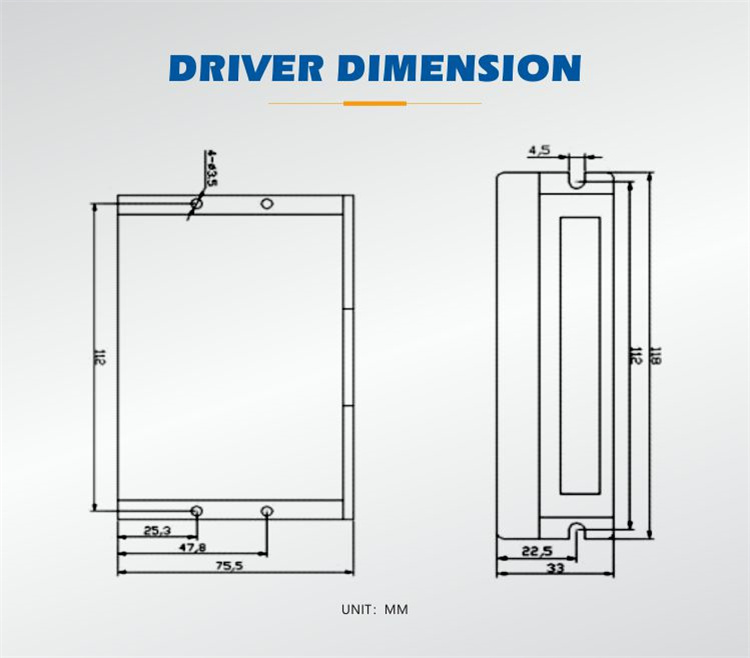
| ابعاد (میلی متر) | 118*33*76 |
| وزن (کیلوگرم) | 0.35 |
بعد، ابعاد، اندازه
کاربرد

بسته بندی

دستگاه تولید و بازرسی

صلاحیت و گواهینامه

دفتر و کارخانه

مشارکت
