موتور پله ای حلقه بسته ZLTECH 57mm نما23 24VDC 1000 برای بازوی ربات





مولفه های
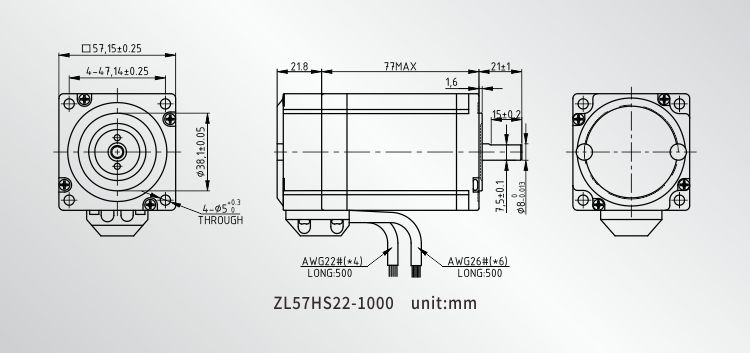
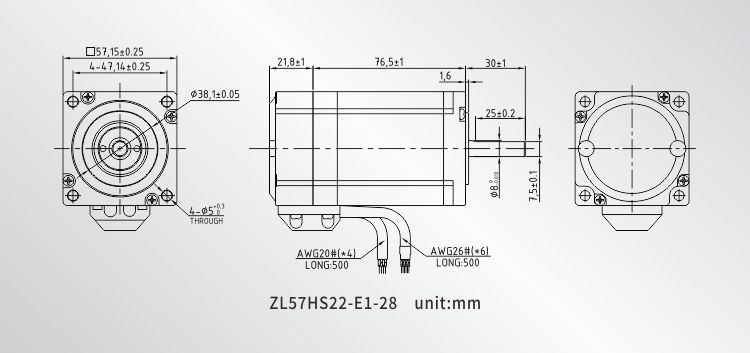
| موتور حلقه بسته | ZL42HS05-1000 | ZL57HS09-1000 | ZL57HS22-1000 | ZL57HS22-E1-28 |
| اندازه | نما17 | نما23 | نما23 | نما23 |
| زاویه گام | 1.8 درجه | 1.8 درجه | 1.8 درجه | 1.8 درجه |
| دقت موقعیت (بدون بار) | ± 0.09 درجه حداکثر | ± 0.09 درجه حداکثر | ± 0.09 درجه حداکثر | ± 0.09 درجه حداکثر |
| قطر شفت (mm) | 5/8 | 8 | 8 | 8 |
| پسوند شفت (mm) | پلت فرم (0.5*15) | پلت فرم (0.5*15) | پلت فرم (0.5*15) | پلت فرم (0.5*15) |
| طول شفت (میلی متر) | 24 | 21 | 21 | 30 |
| گشتاور نامی (نیوتن متر) | 0.48 | 1.2 | 2 | 2 |
| جریان فاز (A) | 2 | 4 | 5 | 5 |
| مقاومت فاز (Ω) | 1.35 | 0.44 | 0.4 | 0.38 |
| اندوکتانس فاز (mH) | 2.8 | 1.4 | 1.7 | 1.7 |
| اینرسی روتور (g.cm) | 77 | 280 | 150 | 480 |
| رمزگذار | 1000 سیم نوری | 1000 سیم نوری | 1000 سیم نوری | 1000 سیم نوری |
| وزن (کیلوگرم) | 0.36 | 1 | 1 | 1.06 |
| طول موتور (میلی متر) | 67.6 | 77.8 | 98.8 | 98.3 |
بعد، ابعاد، اندازه

کاربرد
موتورهای DC بدون جاروبک به طور گسترده در تولید الکترونیک، تجهیزات پزشکی، تجهیزات بسته بندی، تجهیزات لجستیک، ربات های صنعتی، تجهیزات فتوولتائیک و سایر زمینه های اتوماسیون استفاده می شوند.

بسته بندی

دستگاه تولید و بازرسی

صلاحیت و گواهینامه

دفتر و کارخانه

مشارکت

پیام خود را اینجا بنویسید و برای ما ارسال کنید