کنترلر درایور موتور بدون جاروبک ZLTECH 24V-36V 5A DC Modbus RS485 برای AGV


















عملکرد و استفاده
1 حالت تنظیم سرعت
تنظیم سرعت ورودی خارجی: 2 پایانه ثابت پتانسیومتر خارجی را به ترتیب به پورت GND و پورت +5v درایور متصل کنید.انتهای تنظیم را به انتهای SV وصل کنید تا از پتانسیومتر خارجی (10K~50K) برای تنظیم سرعت استفاده کنید، یا از طریق واحدهای کنترل دیگر (مانند PLC، میکرو کامپیوتر تک تراشه و غیره) ولتاژ ورودی آنالوگ را به انتهای SV وصل کنید تا تنظیم سرعت را درک کنید. (نسبت به GND).محدوده ولتاژ پذیرش پورت SV DC OV تا +5V است و سرعت موتور مربوطه 0 تا سرعت نامی است.
2 کنترل کارکرد/استاپ موتور (EN)
کارکردن و توقف موتور را می توان با کنترل روشن و خاموش ترمینال EN نسبت به GND کنترل کرد.هنگامی که ترمینال رسانا است، موتور کار خواهد کرد.در غیر این صورت موتور متوقف می شود.هنگام استفاده از ترمینال run/stop برای توقف موتور، موتور به طور طبیعی متوقف می شود و قانون حرکت آن به اینرسی بار مربوط می شود.
3 کنترل حرکت رو به جلو و عقب موتور (F/R)
جهت کار موتور را می توان با کنترل روشن/خاموش ترمینال F/R و ترمینال GND کنترل کرد.هنگامی که F/R و ترمینال GND رسانا نیستند، موتور در جهت عقربه های ساعت (از سمت محور موتور) کار می کند، در غیر این صورت، موتور در خلاف جهت عقربه های ساعت کار می کند.
4 خرابی درایور
هنگامی که اضافه ولتاژ یا جریان بیش از حد در داخل درایور اتفاق می افتد، راننده وارد حالت حفاظت شده و به طور خودکار از کار می افتد، موتور متوقف می شود و چراغ آبی روی درایور خاموش می شود.هنگامی که ترمینال فعال تنظیم مجدد شود (یعنی EN از GND قطع شود) یا برق خاموش شود، درایور زنگ هشدار را منتشر می کند.هنگامی که این خطا رخ می دهد، لطفاً اتصال سیم کشی با موتور یا بار موتور را بررسی کنید.
5 پورت ارتباطی RS485
حالت ارتباط راننده از پروتکل استاندارد Modbus استفاده می کند که با استاندارد ملی GB/T 19582.1-2008 مطابقت دارد.با استفاده از ارتباط پیوند سریال 2 سیمه مبتنی بر RS485، رابط فیزیکی از یک پورت سیم کشی 3 پین معمولی (A+، GND، B-) استفاده می کند و اتصال سریال بسیار راحت است.
مولفه های
| راننده | ZLDBL4005S |
| ولتاژ ورودی (V) | 24V-36V DC |
| جریان خروجی (A) | 5 |
| روش کنترل | مدباس RS485 |
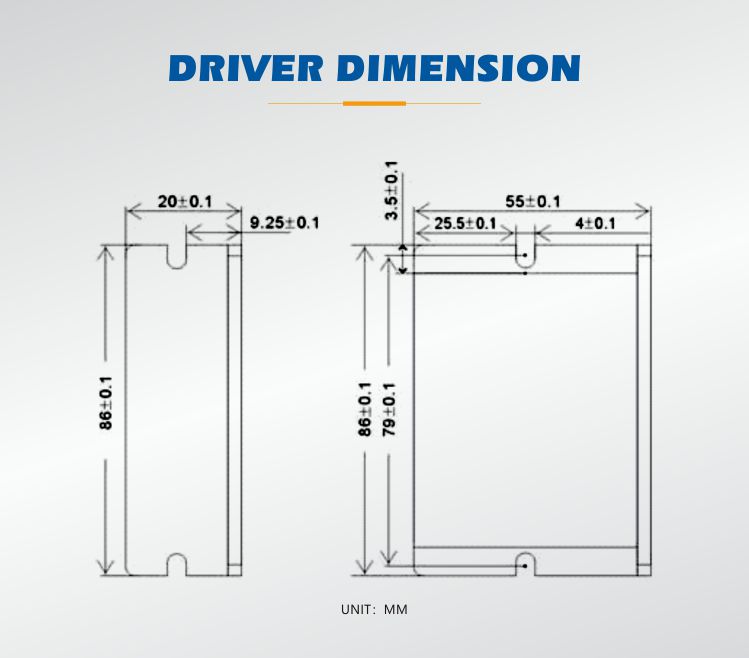
| ابعاد (میلی متر) | 86*55*20 میلی متر |
| وزن (کیلوگرم) | 0.1 |
بعد، ابعاد، اندازه
کاربرد

بسته بندی

دستگاه تولید و بازرسی

صلاحیت و گواهینامه

دفتر و کارخانه

مشارکت

دسته بندی محصولات
-

2S86 ZLTECH 86 سری DC 36V 48V AC 27V-75V clo...
-

ZLTECH 24V-48V 30A Canbus Modbus دو کاناله D...
-

موتور توپی براشلس 15 اینچی ZLTECH 200 کیلوگرمی DC با...
-

پله یکپارچه ZLTECH Nema17 0.5/0.7Nm 18V-36V...
-

ZLAC8030L ZLTECH 20V-60V 60A CANOPEN RS485 DC s...
-

استپ موتور یکپارچه نما23 57 میلی متری ZLTECH با d...





